

The current generation of Wally crawler is investigating the seabed of the Neptune Canada Observatory at the Barkley Canyon methane seep site. In May 2014 the latest version was deployed to 900m depth to start a year of operations. The crawler is equipped with a new methane sensor to monitor the flux of methane into the water from the sediments, and a new side mounted camera for the development in conjunction with DFKI ROBEX partners of an automated 3D mapping and photogrammetry system. This is currently (as of mid-May 2014) in the first stages of testing. In addition to the new camera and the methane sensor, this deployment of iWally has been made in conjunction with the deployment of a pair of Airbus DS automated docking and navigation marker panels. These panels, which originate in design from space projects, will be used to develop underwater navigation algorithms. In the two weeks since these were deployed, iWally has been investigating how visible these markers can be in different conditions.
In phase 2 (2015), the crawler should perform autonomous missions that can be verified by cable connection to Junctionbox. In addition to the autonomous missions which will be possible with the phase 2 iWally crawler, a rear-mounted, camera guided robotic arm will be mounted on the rear of the robot. This arm will be capable of simulating a range of tasks which may be associated with maintenance, power recharging etc, as well as having application for close up scientific work. In phase 3 (2016), wireless missions with regularly return to the Junction box for data and power transmission are planned.
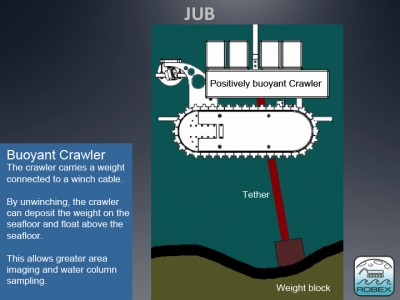
As part of the Crawler design team, Jacobs University Bremen is constructing the main components of the various ROBEX crawlers, as well as developing novel locomotion methods, such as the ‚floating crawler tether system‘ shown here.
Contact: l.thomsen@jacobs-university.de; a.purser@jacobs-university.de

© Jacobs Universität OceanLab | New Airbus DS navigation markers for development of underwater navigation methodologies

© Jacobs Universität OceanLab | First image of the Barkley Canyon methane seep taken in mid May 2014 with the new, uncalibrated side mounted camera
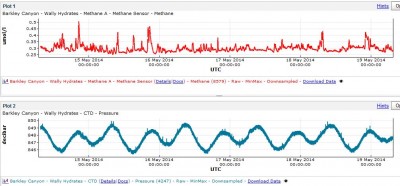
© Jacobs Universität OceanLab | iWally is fitted with a new methane sensor. In this early data it would seem that at the location of deployment, methane seepage is highest at times of highest pressure
 iWally
iWally