

The GEOMAR crawler system MANSIO-VIATOR should be developed to an autonomous robotic system with a „terrain-based“ navigation system. The crawler VIATOR should be able to dock on a central station MANSIO (lat. = common room or abode) for the exchange of data and energy and automatically operate in a predetermined terrain. The aim is to create, in conjunction with the central station, a terrain map based on own camera recordings (biogenic, geological) as a basis for regular measurements and optical monitoring of specific communities, facies or structures.
On the ALKOR expedition 474 the MANSIO-VIATOR system was successfully tested again. Under the lead of GEOMAR and with participation of employees of the ROBEX partners AIRBUS DS, DFKI and DLR, the system was used in a field test in the south-western Baltic. Under different test series different marker systems, odometry and autonomous docking operations were tested under realistic conditions.
Here, for the first time the autonomous docking was successfully demonstrated from a distance of 10m. Since this worked under difficult conditions, the future test campaigns – in which the interplay of VIATOR and MANSIO will be further optimized – are optimistically expected, especially with regard to a successful demonstration mission aboard the Polarstern in autumn 2017.
contact: sfloegel@geomar.de

© Geomar | Current design deep-sea crawler VIATOR

© Geomar | Current design deep-sea crawler VIATOR
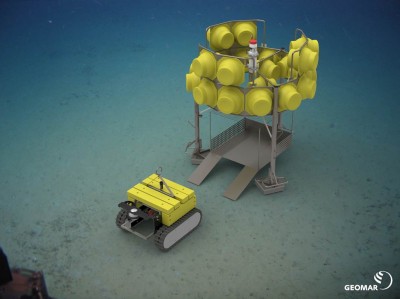
© Geomar | Deep-sea crawler VIATOR with central lander MANSIO at the deep-sea floor
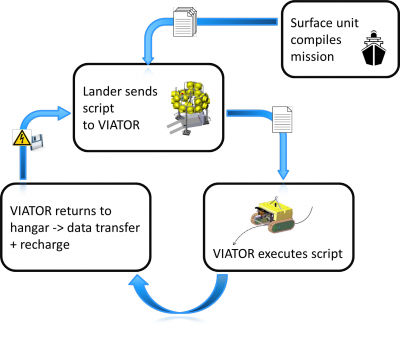
© Geomar | Mission planning for the deployment of MANSIO-VIATOR at the seafloor
 MANSIO-VIATOR
MANSIO-VIATOR