

Die unterschiedlichen wissenschaftlichen Fragestellungen, die man mit Forschung auf dem Mond und in der Tiefsee beantworten will, sollen sowohl mit einer gemeinsamen Methode, nämlich seismischen Untersuchungen, als auch mit einer gemeinsamen technologischen Lösung angegangen werden. Dazu hat man sich im Laufe des ersten Projektjahres darauf geeinigt, gemeinsam eine Kombination eines stationären Systems mit einem oder mehreren mobilen Elementen zu entwickeln und zu bauen. Dabei soll das stationäre System als zentraler Part für die Energieversorgung und den Datenaustausch sorgen, die mobilen Systeme sollen die eigentliche wissenschaftliche Exploration in der Tiefsee bzw. auf dem Mond durchführen. Ziel der Demo-Missionen ist es, die Funktion der gemeinsam entwickelten Technologien zu demonstrieren und zu bewerten.

© F. Wappler Industriedesign | Vision Tiefsee Exploration

© F. Wappler Indutriedesign | Vision Mond Exploration
© Geomar | MANSIO-VIATOR. Eine Entwicklung des ROBEX Crawler Design Teams, die die zentrale Station und eine mobile Einheit darstellen.
Demo-Mission Tiefsee
Das Konzept für die Tiefsee Demo-Mission besteht aus einem stationären Masterlander, welcher die Stromversorgung und die Speicherung und Übertragung von Daten gewährleistet sowie Docking -Funktionen besitzt. Mobile autonome Systeme wie AUVs und Crawler sollen eine Fläche zwischen 100 m und 1 km erkunden. Mit Hilfe dieses Systems können verschiedene Komponenten für z.B. eine zentrale Datenspeicherung und -übertragung mit hoher räumlicher und zeitlicher Flexibilität zur Messung relevanter Umweltparameterkombiniert werden. Der Fokus für alle Tiefsee- Szenarien (z.B. hydrothermale Quellen, Austrittsgebiete, Hypoxie und Dynamik der Eisdecke ) ist es, die hohe räumliche und zeitliche Variation der (I) Umwelt- Parameter (z.B. Wasser-Chemie , Nährstoffe ), (II ) bio-geo-chemische Prozesse und (III) die biologische Vielfalt zu erfassen, was wiederholte Messungen über größere Flächen und Zeiträume erfordert.
Für den Tiefsee-Demonstration Mission soll ein Masterlander – Crawler -Systeme gebaut werden. Der Masterlander dient als Basis für die Crawler. Nach Andocken des Crawlers an den Länder können deren Batterien mit geringem Gewicht und kleiner Batterie-Pack-Größe wieder aufgeladen und die während einer Mission erhobenen Daten gespeichert werden. Wenn eine Verbindung (verkabelt oder nicht verkabelt) zu einer Oberflächenbojebesteht, können Daten auch via Satelliten – Anschluss auf das Festland übertragen werden. Der Crawler als mobile Komponente ermöglicht wiederholte Messungen über längere Zeiträume, individuelle Messungen unterschiedlicher Lebensräume sowie Messungen über große Flächen. Für die gemeinsame Demo-Mission werden Messungen von O2 , Temperatur, Salzgehalt , CH4 und Nährstoffe (z.B. Ammonium) sowie seismologische Messungen in Betracht gezogen.
Als mögliche Testfelder für die Durchführung der Demo-Mission wurden bislang zwei wissenschaftlichen Bereiche, die Gashydrat Fläche von Svalbard und das polare Langzeit Tiefsee-Observatorium HAUSGARTEN ausgewählt. Beide Standorte sind im Thema 1000 verankert und können während einer Expedition mit dem Forschungsschiff kombiniert werden. Am Kontinentalrand von Svalbard werden große Mengen an Methanhydrat vermutet, bei denen derzeit ein Zerfall beobachtet wird und somit Methangas in die Wassersäule freigegeben wird. Umgebungen, die teilweise von einer Eisfläche bedeckt werden, wie z.B. der HAUSGARTEN, gehören zu den am wenigsten erforschten Orte auf der Erde und saisonale Studien sind für das Verständnis dieses sich rasch verändernden Ökosystems unbedingt erforderlich.
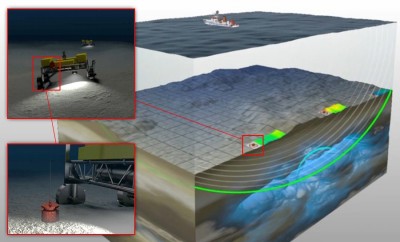
© MARUM | Seismisches Szenario am Tiefseeboden. Eine Kollonne mehrerer Crawler ermöglicht das präziese Aussetzen von Geophonen am Meeresboden.
Wissenschaftliches, Seismisches Szenario in der Tiefsee
Die Anwendung von seismischen Methoden als Thema mit fachübergreifendem Interesse ist für die Detektion und Quantifizierung von Methanhydrat und Methangas im Sediment relevant. Die Grundidee besteht darin, Brechung und Reflexion seismischer Methoden zu kombinieren, die durch die Aufnahme von kombinierten P und S-Wellen-Profile implementiert werden. Weiterhin ist auch die Messung des spezifischen Widerstands geplant, die durch die Verwendung einer gemeinsamen Inversion eine gute Bildgebung (laterale und horizontale Auflösung) erhalten kann und im Vergleich zu derzeitigen Messungen eine 20-mal genauere Quantifizierung der Kohlenwasserstoffe liefert. Aktuell ist dieses Szenario nur durch die Durchführung von mehreren extrem kostenintensiven Schiffs-Missionen realisierbar. Innerhalb von ROBEX ist geplant, eine Kolonne von mehreren Boden-Crawler zu entwerfen und zu bauen, die eine genaue Platzierung von Geophonen an vordefinierten Positionen ermöglicht.
Demo-Mission Space
Im Rahmen der Helmholtz Allianz ROBEX ist in 2017 auf dem Vulkan Etna eine Mond-Analog-Mission geplant, um Technologien für zukünftige Explorationsmission im Sonnensystem zu validieren. Außerdem wurden im Rahmen von ROBEX bereits zwei Doktoranden-Sommerschulen auf den Aeolischen Inseln durchgeführt und es sind auch weitere flankierende Expeditionen für Referenzmessungen zu der Mond-Analog-Mission geplant.
Für die Mond-Analog-Mission wurde von den ROBEX-Wissenschaftlern ein spezielles Szenario ausgewählt, das den Anforderungen an eine wirkliche Mond-Mission entspricht. Dabei geht es um die Installation eines aktiven seismischen Netzes (ASN) auf der Mondoberfläche. Damit wäre es erstmals möglich, die innere Struktur des Mondes und die Zusammensetzung der oberen Schichten des Regoliths zu bestimmen. Bisher unbeantwortete Fragen nach der Existenz und Zusammensetzung eines zentralen Kern des Mondes könnten genauso beantwortet werden wie die nach einer seismischen Aktivität.
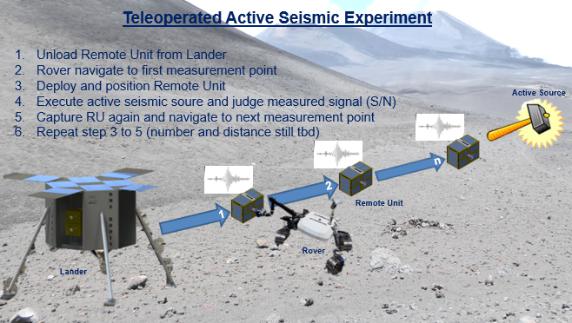
Die Mond-Analog-Mission auf dem Berg Etna wird hauptsächlich aus zwei verschiedenen Experimenten bestehen: Im Rahmen des ersten Experimentes wird der Rover zum Mond-Lander fahren, dort mit dem Roboterarm das seismische Instrument aus der Verschraubung lösen. Dann wird das seismische Instrument in eine Haltevorrichtung auf dem Rover gelegt und der Rover fährt damit an einen vorher festgelegten Punkt, um das Seismometer dort auf den Boden abzulegen. Dann macht das Seimometer eine Messung, wird wieder angehoben und von dem Roboter autonom zu einem weiteren Punkt der Traverse gefahren und dort abgesetzt.
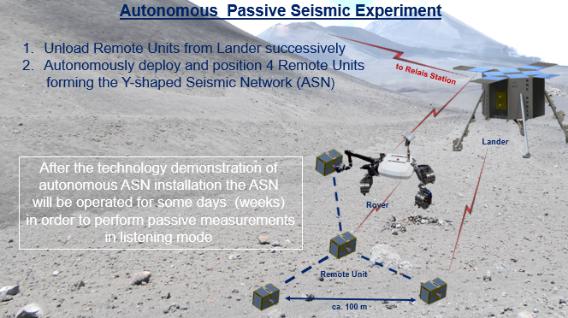
Im Rahmen des zweiten Experiments wird der Rover in der Nähe des Landers ein seismisches Netzwerk in Form eines Y aufbauen, dessen einzelne Seitenlängen etwa 10 m betragen werden.
Für beide Experimente bestehen hohe Ansprüche an die Fahrleistungen, sowie an den Manipulatorarm, der die Instrumente sorgfältig und genau auf dem Boden ausrichten muss. Die weitere technologische Herausforderung besteht in dem teilweise ferngesteuerten, teilweise vollständig autonomen Betrieb des Systems.
 Als Testgelände für die Demonstration ist das Gebiet La Montagnola / Piano del Lago auf der südlichen Seite des Berges Etna als optimal für die wissenschaftlichen Anforderungen gefunden worden. Es bieten sich dort sowohl passende landschaftliche und geologische Bedingungen als auch die notwendige logistische Infrastruktur.
Als Testgelände für die Demonstration ist das Gebiet La Montagnola / Piano del Lago auf der südlichen Seite des Berges Etna als optimal für die wissenschaftlichen Anforderungen gefunden worden. Es bieten sich dort sowohl passende landschaftliche und geologische Bedingungen als auch die notwendige logistische Infrastruktur.
besten passend zu unseren wissenschaftlichen Anforderungen gefunden, eine ausreichende Landschaft für einen Mond analoge Demonstration Bereitstellung und auch die logistische Infrastruktur für unsere Mission anbietet.
Die Mond-Analog-Mission findet im Juli 2017 statt. Vorbereitende Tätigkeiten und Feldtests mit dem kritischsten Gerät sind für September 2016 auf dem Etna geplant.
 Demo-Missionen
Demo-Missionen