Ziel dieses Design Teams ist die Definition und Entwicklung geeigneter Docking-Interface-Systeme für die beiden ROBEX Szenarien. Je nach Möglichkeit und Ergebnis wird ein Funktionsmuster bis hin zum Prototyp für jede der beiden Disziplinen aufgebaut und durch Tests validiert.
Das Docking Interface soll eine autonom oder auch telerobotisch bedienbare Schnittstelle für die mechanische, elektrische, signaltechnische und thermale Kopplung von zwei Systemen sein.
Schnittstellen befinden sich grundsätzlich zwischen nahezu allen Einheiten, der für die Exploration benötigen Geräte, wie Landereinheiten, Fahrzeuge (Rover, Crawler), Manipulatoren und Werkzeuge bzw. Instrumente.
Je nach Grad der Autarkie und Aufgabe der jeweiligen Komponenten müssen Kommunikationsdaten, Energie, gegebenenfalls Fluide übertragen werden bis hin zur mechanischen Verbindung zweier Einheiten.
Aufgrund unterschiedlicher Aufgaben dieser Einheiten sind verschiedenartige Designs notwendig, wobei der modulare Ansatz ein elementares Kriterium darstellt. Beispielsweise soll die Energie- und Datenübertragung mit einem auswechselbaren Modul innerhalb des Interface-Systems drahtlos oder mit einer Steckverbindung erfolgen können.
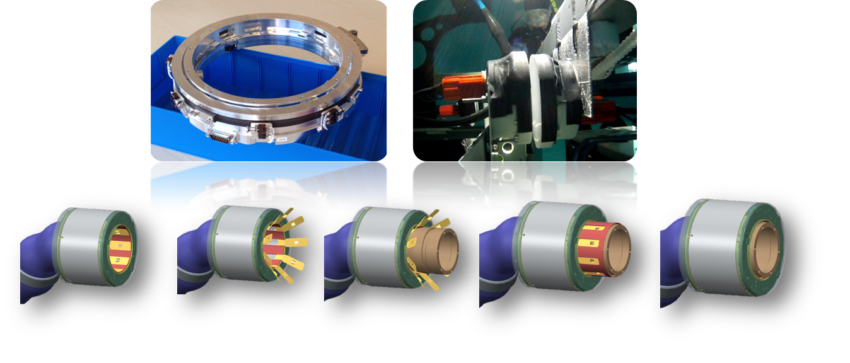
Die aktuellen Entwicklungen betreffen ein Interface-System zur drahtlosen Energie- und Datenübertragung zwischen Kettenfahrzeugen und deren Landereinheiten in der Tiefsee, einer Schnittstelle zwischen Lander und Nutzlastelementen und einem Docking-Interface-System zwischen einem Roboter-Arm und den Nutzlastelementen.
Letzteres wurde in Anlehnung an einen neuartigen Docking-Prozess zwischen Roboter-Arm und universellen Nutzlastboxen bzw. wissenschaftlichen Instrumenten entwickelt und konstruiert. Somit soll ein wiederholbarer, robuster und dadurch vor allem sicherer Docking-Prozess unter extremen Umweltbedingungen künftige teilautomatisierte Explorationsaufgaben unterstützen.
Kontakt: armin.wedler@dlr.de