

Die Entwicklung von Unterwasser-Gleitern begann vor 20 Jahren und heute gibt es bereits eine Reihe von kommerziellen Systemen auf dem Markt. Ihr primäres Einsatzgebiet war die Sammlung physikalischer Parameter des Ozeans, seit ein paar Jahren wurden biochemische Sensoren hinzugefügt.
Aufgrund ihrer begrenzten Energieressourcen und Nutzlastkapazitäten gibt es noch viel Raum für Entwicklungen und die Idee der Designoptimierung für neue Anwendungsbereiche wird innerhalb von ROBEX verfolgt werden. Insbesondere soll überprüft werden, ob Segelflugzeuge als Plattform für bathymetrische und elektromagnetische Sondierungen des Meeresbodens eingesetzt werden können. Weiterhin wurden Ideen zur Verwendung der Plattform für neuartige Untersuchungen innerhalb der Wassersäule entwickelt. Mit Hilfe der im ROBEX Konsortium versammelten Expertise können völlig neue technische Konzepte insbesondere im Hinblick auf Leichtbauweise und verbesserter Betriebssicherheit durch Luftfahrt-Konzepte entwickelt werden.
Aktuell wurden die Randdaten für die Realisierung der Hülle festgelegt um den Aufbau der Steuerungshard- und software und die Entwicklung einer Simulationsumgebung vorantreiben zu können. Nach Abschluss der Designarbeiten zur Gleiterhülle wurde ein Fertigungsauftrag an eine Bootsbauwerft erteilt. Parallel hierzu ist eine Startrampe entstanden, die einen kontrollierten Anschub des Gleiters auf seine vorauskalkulierte Endgeschwindigkeit und seinen Gleitwinkel erlaubt. Dieses ist eine wichtige Voraussetzung, um in Tanks mit begrenzten Abmessungen aussagekräftige Flugdaten zu gewinnen. Die für die Flugversuche notwendige Sensorik und Elektronik wurde aufgebaut und getestet, so dass diese für die geplanten Tankversuche im Juli 2015 mit dem ersten Gleiterprototypen MOTH zur Verfügung steht.
Kontakt: waldmann@marum.de
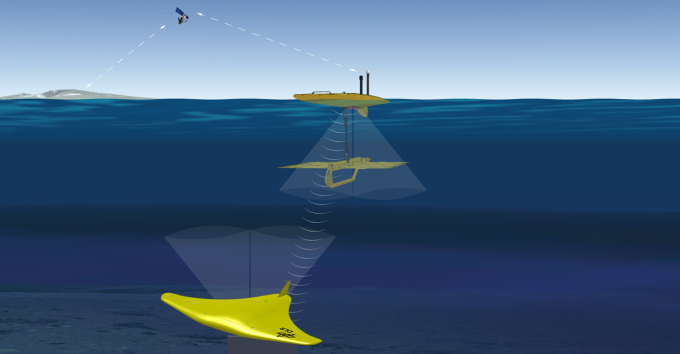
© Marum |Zukunftsvision für den Einsatz eines Unterwassergleiters