

Auf dieser Seite finden Sie eine Auswahl an Tiefsee Technologien, die von den in ROBEX involvierten Meeresforschungs-Institutionen betrieben und derzeit in der Meeresforschung eingesetzt werden.

© Geomar | ROV Kiel 6000
Ferngesteuertes Unterwasserfahrzeug ROV
Ein Remotely Operated Vehicle (ROV) ist ein kabelgeführtes Unterwasserfahrzeug für die Anwendung in Industrie, Militär aber auch in Wissenschaft.
Für die Anwendung in der Tiefsee werden meist schwere Arbeits-ROVs verwendet, die sich aufgrund der hohen Belastung auf die Fahrzeug-und Halteseile nur langsam fortbewegen. Die Fahrzeuge arbeiten videokontrolliert und jede Bewegung entlang aller Achsen kann gesteuert werden. Aufgrund der elektronischen und optischen Kabelverbindung sind lange Einsatzzeiten möglich.
Zwischen ROVs und AUVs platziert sich das Hybrid-ROV. Dieses Fahrzeug ist ausschließlich batteriebetrieben, allerdings kann der Betrieb entweder völlig autonom oder ferngesteuert über einen ultra-dünnen Glasfaser-Haltegurt (<200μ Durchmesser) erfolgen.
Eine Übersicht über ROVs für die Tiefseeforschung finden Sie hier:
ROV Kiel 6000, ROV PHOCA, Quest 4000, Cherokee

© Geomar | AUV ABYSS
Autonomes Unterwasserfahrzeug AUV
Autonome Unterwasserfahrzeuge (Autonomous Underwater Vehicle, AUV) sind unbemannte Tauchfahrzeuge für wissenschaftliche, kommerzielle und militärische Zwecke. Im Gegensatz zu ROVs können AUVs eine höhere Geschwindigkeit erzielen (0,5 – 3,0 m / s). Sie sind allerdings nicht in der Lage, direkt am Zielort zu stoppen, in der Tiefe ihre Position zu halten oder in der Wassersäule zu schweben. AUVs ermöglichen den Zugang zu Meeresregionen, die sonst gar nicht, nicht ungestört oder nur mit großem Aufwand erreichbar sind. Besonders interessant ist der Einsatz unter Eis. Hier werden dann besonders hohe Anforderungen an die Systemsicherheit und Zuverlässigkeit aller Einzelkomponenten gestellt, da man bei eventuell auftretenden Fehlern einem AUV vermutlich keine Hilfe zukommen lassen kann.
Je nach Bauform und Größe können in AUVs eine Vielzahl unterschiedlicher Sensoren integriert werden. Aufgrund ihrer Lagestabilität im getauchten Zustand sind diese Fahrzeuge besonders für den Einsatz von Sonarsystemen geeignet.
Eine Übersicht über AUVs für die Tiefseeforschung finden Sie hier:
PAUL, DAGON, ABYSS, SEAL

© T. Soltwedel, AWI
Lander
Lander sind autonome Trägersysteme, mit deren Hilfe Prozesse auf der Sedimentoberfläche studiert werden können. Sie erreichen den Meeresboden in einem Freifall-Modus und werden am Ende der Mission durch einen akustischen Befehl wieder an die Oberfläche gerufen. Aufgrund vieler verschiedener wissenschaftlicher Fragestellungen wie z.B. die Erkundung spezifischer geo-morphologischer Merkmale an kalten Quellen oder Gas-Hydraten muss eine gezielte und weiche Landung des Landers gewährleistet werden. Für diese Anforderungen ist ein spezielles Lander-Gerüst entwickelt worden, welches mit dem Schiff über Koaxial-oder Hybrid-Glasfaserkabel verbunden ist und die Telemetrie, Kameras, Lampen sowie einen Freisetzungsmechanismus trägt, um den Lander an dem gewünschten Zielort abzusetzen. Lander sind universelle Geräteträger mit Roboter-Funktionen zur Platzierung von Instrumenten und Durchführung von in situ Experimenten.
© Geomar
Meeresboden-Observatorium MoLab
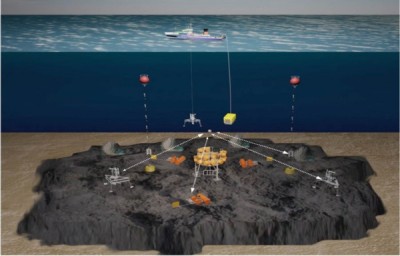
Das Meeresboden-Observatorium „MoLab“ („Modulares multidisziplinäres Meeresboden-Observatorium“) soll über Monate hinweg auf mehreren Quadratkilometern Meeresboden verschiedene biologische, physikalische, chemische und geologische Parameter messen. Es wurde vom Helmholtz-Zentrum für Ozeanforschung Kiel (GEOMAR) entwickelt und zum Teil zusammen mit Firmen aus Schleswig-Holstein gebaut. Das System besteht aus einem Verbund von verschiedenen Geräten, die je nach wissenschaftlicher Fragestellung flexibel zusammengestellt werden können. Die Besonderheit des „MoLab“ besteht darin, dass es auch von mittelgroßen Forschungsschiffen aus eingesetzt, betreut und wieder eingeholt werden kann. Außerdem kann es schnell an neue Einsatzgebiete oder wissenschaftliche Aufgaben angepasst werden. Damit schließt „MoLab“ eine entscheidende Lücke zwischen den geplanten, sehr kostspieligen und räumlich gebundenen, verkabelten Observatorien einerseits und den bisher üblichen schiffsgestützten kurzen Forschungsaufnahmen andererseits.

© Jacobs University, OceanLab | Tiefsee Crawler Wally
Tiefsee Kettenfahrzeug
Der Tiefsee Crawler ist ein ferngesteuertes Kettenfahrzeug für den Einsatz in der Tiefsee. Es wird als ein universelles Trägerfahrzeug für verschiedene Meerestechnik Sensoren, die über das Internet aus der ganzen Welt betrieben werden kann, gebaut. Der Crawler wird für Langzeitbeobachtungen und langfristige Messungen am Meeresboden mit einem wartungsfreien Betrieb für Zeiträume von bis zu einem Jahr entwickelt. Um Schäden durch das Meerwasser zu vermeiden, besteht der Crawler komplett aus Titan und Kunststoff. Je nach Ausführung kann der Crawler in Tiefen von 2000, 4000 oder 6000 Metern eingesetzt werden. Aufgrund seines modularen Aufbaus ist eine (Design-) Anpassung entsprechend der geplanten Missionen und Aufgaben möglich.
Hier erhalten Sie mehr Information zum Tiefsee Crawler „Wally“ und seinen Einsatz im Ocean Networks Canada Observatorium. YouTube video Wally the Crawler
Das Design Team „Crawler“ befasst sich innerhalb von ROBEX mit der Entwicklung verschiedener autonom funktionierender Unterwasser-Kettenfahrzeuge.

© Thorsten Klein, MARUM, Universität Bremen
Meeresboden-Bohrgerät MeBo
Das am MARUM entwickelte MeBo ist ein transportables Bohrgerät, das mit einem stahlarmierten Spezialkabel auf den Meeresboden abgesetzt wird und dort vom Schiff aus ferngesteuert operiert. Es kann in Wassertiefen von bis zu 2000 Meter eingesetzt werden und Kerne aus Lockersedimenten und Festgestein von bis zu 70 Meter Länge gewinnen.