

Die Integration von Hardware und Software für teleoperiertes Handling von Robotern über Internet ist Ziel dieses Design Teams. Bisher können mobile Roboter in der Tiefsee videogesteuert werden und auf Befehl Experimente mit autonom ablaufenden Aufgaben durchführen (z.B. das Absenken sogenannter benthischer Kammern). Mithilfe der Erfahrungen des DLR im Bereich der Telemanipulation soll ein Greifarm für den Tiefsee-Crawler Wally der Jacobs Universität entwickelt werden, der eine Manipulation von Gegenständen am Meeresboden ermöglicht. Wally könnte dann änhnlich wie ein ROV arbeiten, der trotz Zeitverzögerung bei der Übertragung der Signale per Internet kontrolliert arbeiten soll. Die Raumfahrt hat diesbezüglich bereits jahrelange Erfahrung. Einsatzgebiete sind nicht nur die Tiefseeforschung, sondern auch Offshoreinstallationen der Öl- und Gasindustrie.
Kontakt: armin.wedler@dlr.de; l.thomsen@jacobs-university.de

© DLR-RMC | Mobiler humanoider Roboter „Rollin‘ Justin“

© NEPTUNE Canada | Tiefsee-Crawler „Wally“ soll mit einem Greifarm aufgerüstet werden
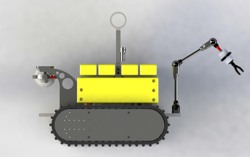
© Jacobs University, Ocean Lab | Wally-Modell mit Greifarm