

Auf dieser Seite finden Sie eine Auswahl an Raumfahrt Technologien, die von den in ROBEX involvierten Raumfahrt- und Robotik Institutionen entwickelt wurden.

© DLR-RMC
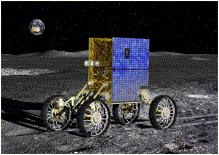
Asimov
In Kooperation mit dem DLR und der PTS GmbH wurde für den „Google Lunar X-Prize“ der „Asimov Jr. R3″ entwickelt, der 60 Zentimeter lang, 40 Zentimeter breit, 50 Zentimeter hoch ist und etwa 29 Kilogramm wiegt. Vom DLR stammt auch die Antriebstechnologie, die bereits von 2005 bis 2010 im Projekt ROKVISS ihre Weltraumtauglichkeit in einem Roboterarm auf der Außenhülle der ISS bewiesen hat. Eine besondere Fähigkeit ist die autonome Navigation auf Basis der Umgebungswahrnehmung mittels Semi-Global Matching (SGM). Hierbei gibt der Mensch lediglich Zielpunkte im Kamerabild vor, woraufhin sich der Rover selbständig einen sicheren Weg zu diesen Zielpunkten sucht, ohne die Umgebung vorab zu kennen. Diese am DLR entwickelte Technologie ist nötig, da eine direkte Fernsteuerung von Weltraumrobotern aufgrund langer Signallaufzeiten sehr umständlich und langsam ist und damit eine sehr hohe Gefahr besteht, mit dem Rover in unwegsamem Gelände stecken zu bleiben.
© DLR-RMC
Mobiles Payload Element MPE
Das MPE ist ein kleines, autonomes, innovatives Fahrzeug in der 10 kg-Klasse für die Exploration der Umgebung des Mond-Landeplatzes. Das MPE soll Proben von Mondregolith sowohl aus dem Untergrund als auch im Bereich von beschatteten Standorten identifizieren, ihren geologischen Kontext feststellen und sie zum Lander zurücktransportieren. Dies ermöglicht den Zugang zu Probenmaterial, welches nicht durch den Landevorgang verunreinigt ist. Damit erhöhen sich die Chancen zur Ermittlung möglicher flüchtiger Substanzen innerhalb des Probenmaterials.
© DLR-RMC
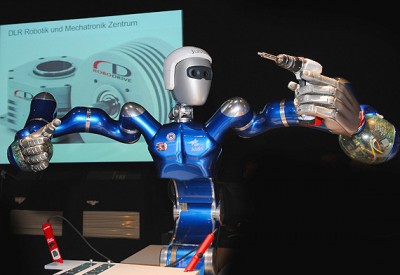
JUSTIN
In der Zukunft kann man sich humanoide Roboter sowohl im Haushalt als auch in der Raumfahrt vorstellen. Für die Durchführung komplexer Aufgaben ist die Manipulation ein zentrales Thema.
Der mobile Roboter Justin mit seinen rückgekoppelten Leichtbauarmen und seinen zwei Vier-Finger-Händen ist eine ideale Plattform für diese experimentelle Forschung. PMD-Sensoren und Kameras erlauben die 3D-Rekonstruktion der Roboter-Umgebung und ermöglichen Justin damit vorgegebene Aufgaben selbstständig durchzuführen.

© DLR-RMC
Der DLR Krabbler – ein sechsbeiniger Laufroboter
Für die Erforschung von Planeten sowie für Such-und Rettungseinsätze auf der Erde gelten Gruppen bestehend aus sechsbeinigen Krabblerrobotern als vielversprechende Alternative oder Unterstützung für robotische Rad-und Kettenfahrzeuge. In diesem Zusammenhang hat das DLR ein erstes Krabbler- Labormuster gebaut, an dem die Möglichkeiten des sechsbeinigen Laufens untersucht werden. Somit dient der Krabbler als Testumgebung für die Entwicklung und Evaluierung verschiedener Kontroll-, Gang und Navigations-Algorithmen.
© DLR-RMC
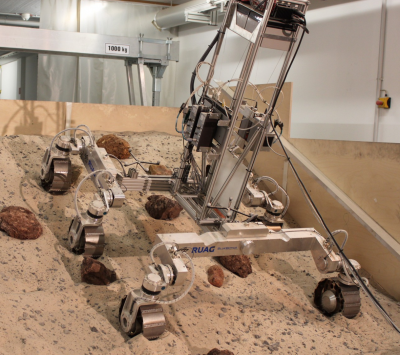
DLR Labor-Testanlage PEL
Die DLR-RMC Testeinrichtung PEL (Planetares Explorationslabor) besteht aus einem Indoor-Bodengelände mit begleitenden hochgenauen Messeinrichtungen. Die Anlage wird dazu verwendet, um planetare Oberflächen für Traktions- und Navigationsaufgaben von Fahrzeugen zu reproduzieren, hochauflösende Oberflächenmodelle zu erstellen und Tests unter normalen und kritischen Fahrmanövern durchzuführen. Die Verifikation von Computer-generierten Simulationsmodellen spielt dabei eine bedeutende Rolle. Der Hauptteil des Labors besteht aus dem Bodengelände für eine flexible Nachbildung des planetaren Testgebietes. Zur Untersuchung der Mobilität bei verschiedenen Geländetypen kann das Testfeld aus unterschiedlichen Materialien bestehen, wie z.B. aus weichen sandartigen Böden, Kiesel, oder Hindernissen wie Steine oder größere Felsbrocken. Für die Nachbildung von Geländesteigungen (z.B. in Kraterregionen oder bei Bergauf- und Bergabfahrten) kann ein Teil der Bodenbox bis zu 30o gekippt werden. Darüber hinaus ist die Anlage mit zwei unterschiedlichen Messsystemen ausgestattet: Ein optisches System erlaubt die Aufnahme von 3D Höhendaten der Testfläche, die dann z.B. in eine Computersimulation eingebunden werden können. Ein zweites, ebenfalls optisches System, erlaubt die Erfassung der jeweiligen Position und Orientierung des Fahrzeuges während der Fahrmanöver. Unter den stets reproduzierbaren Indoor-Bedingungen ist es möglich, die Messergebnisse untereinander zu vergleichen sowie das reale mit dem simulierten System. Dies erlaubt dann eine erhöhte Zuverlässigkeit in der Vorhersage der Fahreigenschaften des operationellen Fahrzeuges auf der jeweiligen Planetenoberfläche. Ergänzende Messvorrichtungen sind ein Bevameter (Becker Value Meter) zur Bestimmung der physikalischen Eigenschaften des weichen Bodens, sowie eine Einzelrad-Testanlage zur Vermessung der Zugkraft und Traktionseigenschaften unter einstellbaren Schlupfbedingungen für spezifisch entworfene bzw. optimierte Radgeometrien.
Im Youtube-Kanal des DLR-RMC aus Oberpfaffenhofen finden Sie Videos und weitere Informationen: http://www.youtube.com/user/DLRRMC

© DFKI GmbH
SPACE CLIMBER: frei kletternder Roboter für extraterrestrische Krater
Der Roboter „SpaceClimber“ soll nachweisen, dass Laufrobotersysteme für zukünftige extraterrestrische Missionen in schwierigem Gelände, insbesondere in Krater oder Felsspalten, eine Lösung darstellen. Das zu entwickelnde Robotersystem soll nicht-uniforme Steigungen bis zu 80% sicher beherrschen und auf Basis der eingebrachten Sensorik in der Lage sein, dort lokal autonom zu navigieren. Das System würde somit eine Technologie im Bereich Mobilität bereitstellen, welche zukünftige Krater- und Canyonexploration ermöglicht. Besonderes Augenmerk wird bei SpaceClimber auf Robustheit, Energieeffizienz, Ausfallsicherheit und Autonomie des Roboters gelegt. Die wichtigste Komponente um diese Ziele zu erreichen sind die Antriebe für den Bewegungsapparat. Für das System wurden daher intelligente, leichte, kraftvolle und energieeffizienten Gelenke entwickelt. Wichtig für eine hohe Stabilität in steilem Gelände ist die Entwicklung und Umsetzung neuartiger Fußkonzepte.

© DFKI GmbH
ASGUARD III: Advanced Security Guard V3
Asguard III ist ein mobiles Robotersystem mit 4 angetriebenen Sternrädern und einem passiven Körperfreiheitsgrad. Die Radgeometrie ermöglicht es dem Roboter sich in unebenem Gelände zu bewegen und Treppen zu steigen. Dieser Roboter basiert auf der Asguard II Plattform und wurde mit einer Vielzahl zusätzlicher Sensoren und einem sehr leistungsfähigen Steuerrechner ausgestattet. Der Sensorkopf mit Laserscanner, Stereo-Camera-System und Inertialmesssystem erlaubt es dem Roboter seine Umgebung zu erfassen und autonom durch unbekanntes Gelände zu navigieren.