

Das Geomar-Crawler–System MANSIO-VIATOR soll im Verlauf des Projekts zu einem autonomen, robotischen System u.a. mit einem „Terrain-based“ Navigationssystem ausgebaut werden. Der Crawler VIATOR soll in der Lage sein, an eine Zentralstation MANSIO (lat- = Aufenthaltsraum, Bleibe) zum Austausch von Daten und Energie anzudocken und selbständig in einem vorgegebenen Terrain operieren. Ziel ist, in Verbindung mit der Zentralstation eine Terrainkarte basierend auf eigenen Kameraaufnahmen zu erstellen, die als Grundlage für regelmäßige Messungen und das optische Monitoring spezifischer Lebensgemeinschaften, Facies oder Strukturen (biogen, geologisch) dient.
Auf der ALKOR Reise 474 (2.4.-5.4.2016) wurde das MANSIO-VIATOR System wiederholt erfolgreich getestet. Unter Leitung des GEOMAR und mit Beteiligung von Mitarbeitern der ROBEX Partner AIRBUS, DFKI, DLR und ISeaMC wurde das System in einem Feldtest in der südwestlichen Ostsee eingesetzt. Im Rahmen verschiedener Versuchsreihen wurden verschiedene Marker-Systeme, die Odometrie und autonome Docking-Vorgänge unter realistischen Bedingungen getestet.
Hierbei konnte erstmals das autonome Docking aus einer Entfernung von 10m erfolgreich demonstriert werden. Da dies unter schwierigen Bedingungen funktionierte, werden auch die zukünftigen Testkampagnen optimistisch angegangen, bei denen das Zusammenspiel von VIATOR und MANSIO weiter optimiert werden soll.
Somit sollte einer erfolgreichen Demonstrations-Mission an Bord der Polarstern im Herbst 2017 „nichts mehr im Wege stehen“.
Kontakt: sfloegel@geomar.de

© Geomar | Aktuelles Design VIATOR

© Geomar | Aktuelles Design VIATOR

© Geomar |Tiefsee-Kettenfahrzeug VIATOR mit Zentrallander MANSIO am Meeresboden
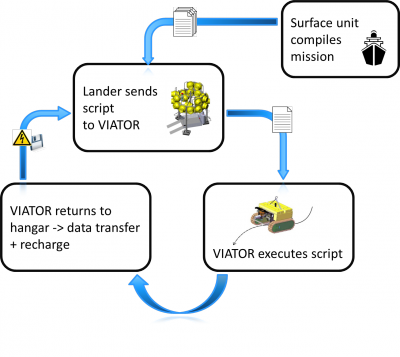
© Geomar | Missionsplanung für den MANSIO-VIATOR-Einsatz am Meeresboden
 VIATOR
VIATOR