Im Jahr 2017 findet zum dritten Mal die internationale ROBEX Summerschool auf der Insel Vulcano statt, alle weiteren Informationen und Bewerbungsmaterial findet man sich unter http://robexsummerschool.de
Veröffentlicht am: 05.03.2017


Im Jahr 2017 findet zum dritten Mal die internationale ROBEX Summerschool auf der Insel Vulcano statt, alle weiteren Informationen und Bewerbungsmaterial findet man sich unter http://robexsummerschool.de
The First ROBEX International Summer School will be held on Vulcano (Eolian Islands, Italy) in the period 24 August – 2 September 2016. For more more information please visit the summer school website
Der Rover des DLR-RMC „RMexplorer!“ hat erfolgreich und in beeindruckender Geschwindigkeit alle Aufgaben des Spacebotcamp 2015 gemeistert. Dies belegt die Leistungsfähigkeit des LRU-Rovers“ für eine autonome Mission, wie sie bei der Demonstrations Mission „Mond-Analog“ im Jahr 2017 innerhalb von ROBEX auf dem Ätna (Sizilien) durchgeführt werden soll.



Forscher und Ingenieure des Alfred-Wegener-Institutes (AWI) haben während der aktuellen Forschungsreise des Forschungsschiffes Sonne (So 242-2) erste erfolgreiche Tiefsee-Fahrten mit dem autonom agierenden AWI-Unterwasserroboter Tramper durchgeführt. Die Testfahrten des Kettenfahrzeuges erfolgten in einer Tiefe von 4150 Metern in einem Gebiet des tropischen südöstlichen Pazifiks, circa 850 km vor der Küste Perus (lesen Sie mehr).
Vom 24. bis 27. August 2015 wurde das komplexe Zusammenspiel des ROBEX Crawlers „VIATOR“ mit dem Lander „MANSIO“ in etwa 2,5 m Tiefe unter den Bedingungen des Hafenbeckens getestet. Nachdem vorausgehende Tests im letzten November im Testbecken des DFKI in Bremen stattgefunden hatten, war dies nun der nächste Schritt in Richtung realistischer Bedingungen im Rahmen der zukünftigen Einsätze des Lander-Crawler Systems in der Tiefsee. Unter der Leitung des GEOMAR waren die Designteam-Partner Airbus DS und das DFKI aus Bremen intensiv involviert. Ziele der Tests waren die Erprobung der Navigationsmarker und des Dockings des VIATOR im Lander. Die angewendeten Verfahren hatten in zuvor stattgefundenen Laborversuchen ihre Tauglichkeit unter Beweis gestellt. Mithilfe der aus der Raumfahrt eingebrachten und binär codierten „Navigationsmarker“ – die bereits beim autonomen Andocken des unbemannten Transporters ATV an die Internationale Raumstation erfolgreich eingesetzt werden – zeigten sich die Grenzen der Sichtbarkeit in einem durch Partikel und durch die Lichtverhältnisse getrübten Wasser in einer realistischen Umgebung. Das Team hat zwar sehr kurzfristig noch aktiv beleuchtete Navigationsmarker gebaut, aber auch diese Variante führte noch nicht zum erwarteten Erfolg. Hier wird nun bis zum nächsten Testschritt, einer Kurzausfahrt mit dem Forschungsschiff ALKOR Mitte November, intensiv an Lösungen gearbeitet. Neben den technischen Zielen im Rahmen der Unterwasser-Tests war ein wesentlicher Aspekt für die beteiligten Partner, auch das operationelle Zusammenspiel beim Umgang mit den Geräten beim Ein- und Ausbringen in und aus dem Wasser einzuüben und dabei auch als Team zu agieren. Insbesondere für die an den Tests beteiligten Partner aus der Raumfahrt – Airbus DS und DFKI – war es sehr interessant, die pragmatischeund lösungsorientierte Vorgehensweise der Kollegen vom GEOMAR zu erleben.


Wie bringt man ein Fluggerät in den Weiten des Arktischen Ozeans ans Ziel, wenn der Kompass keine zuverlässigen Positionsdaten liefert? Ingenieure an Bord des Forschungseisbrechers Polarstern des Alfred-Wegener-Instituts programmierten einen Multikopter so, dass er trotz Missweisung des Erdmagnetfeldes nahe des Nordpols navigieren kann. Einen ersten erfolgreichen autonomen Testflug nebst Landung feierten die Wissenschaftler kürzlich auf einer Eisscholle (lesen Sie mehr).
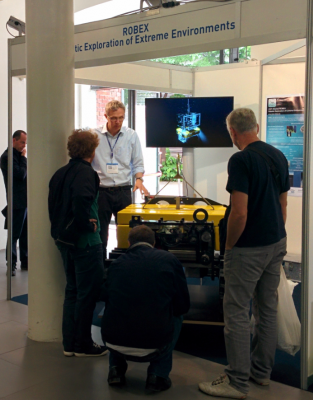
Vom 18. bis 21. Mai 2015 präsentierten Alexander Duda (DFKI) und Laurenz Thomsen (Jacobs University) den iWALLY in einem fortgeschrittenen Stadium der Entwicklung auf der Oceans15 Konferenz in Genua. Der kleine ROBEX–Stand zog ein begeistertes Publikum bestehend aus Wissenschaftlern, Beamten und Vertretern der Industrie an. Es wurden Kontakte mit zahlreichen Besuchern für die mögliche Entwicklung von zukünftigen Kooperationen und Verträgen geknüpft. Alexander demonstrierte unter anderem das Laser–Kamerakonzept und erhielt sofort ein interessantes Jobangebot von einer Firma in Kalifornien (das er hoffentlich ablehnen wird). Das hat mal wieder gezeigt, dass junge ROBEX Ingenieure bestens für den internationalen Arbeitsmarkt geeignet sind.
Im Rahmen des ROBEX Scouting Trips wurde mit dem „Istituto Nazionale die Geofisica e Vulcanologia“ (INGV) in Catania über eine Kooperation diskutiert sowie potentielle Testsites für die ROBEX Mond-Analog-Mission auf der Insel Vulcano, der Nord- und Südseite des Etna eingehend besichtigt und teilweise intensiv vermessen. Die dabei gesammelten Eindrücke und Informationen aus erster Hand werden nun für eine systematische Evaluierung aufbereitet. Es gibt nun sehr gute Kandidaten für die Demonstration eines vollautonomen Aufbaus eines seismischen Netzwerk in einer Mond-Analog-Umgebung im Sommer 2017.
Von der einzig möglichen Testsite auf der Insel Vulcano wurden mittels Octocopter und Laser Scanner ein ca. 200 x 200 m großes Areal gescannt um eine sehr feingranulare DEM für die Simulation zu erhalten.



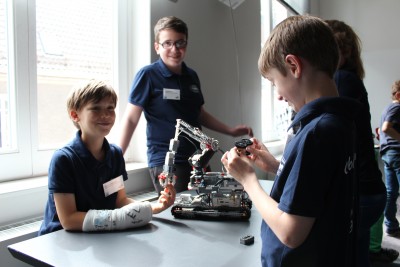
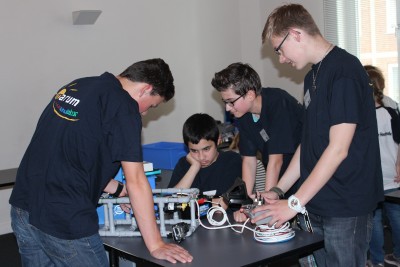
Am 15.6.2015 wurde mit einer bunten und lebhaften „Finissage“ das ROBEX-Schulprojekt abgeschlossen. Genau zwei Monate lang haben sich insgesamt 54 Schülerinnen und Schüler im Alter von 8 bis 18 Jahren aus insgesamt 10 verschiedenen Klassen unter Anleitung der Schülerlabore des Marum und des DLR mit den Herausforderungen extremer Umweltbedingungen auseinandergesetzt. Unter dem Motto „Oben oder Unten – ist doch egal. Oder?“ wurden sowohl aus Legomindstorm, als auch aus anderen Materialien Roboter für die Erkundung unter Wasser sowie für die Marsoberfläche entworfen, entwickelt und während der Finissage erfolgreich vorgeführt. Alle Materialien wurden freundlicherweise von der Airbus GmbH für das Schulprojekt gestiftet.
Das Spektrum reichte von unterschiedlich geformten steuerbaren Unterwasserrobotern, die noch mit Instrumenten ausgestattet werden sollen, über ein ganzes Team von Marsrobotern, welche sowohl autonom fahren, Hindernisse überrollen oder zur Seite räumen, Gegenstände einsammeln und gezielt absetzen konnten bis zu selbst entworfenen Robotern, die entweder Vulkane finden und vermessen oder auch Felsklötze anbohren sollen.


 Da die Ergebnisse sowohl von den Zielen „Tiefsee“ und „Mars“ als auch bzgl. der beteiligten Altersgruppen nicht vergleichbar waren, wurde kein Preis ausgelobt, dafür erhielten aber alle Schülerinnen und Schüler eine Urkunde und einige Erinnerungsstücke an die direkt beteiligten ROBEX-Partner AWI, DLR, Marum und Airbus.
Da die Ergebnisse sowohl von den Zielen „Tiefsee“ und „Mars“ als auch bzgl. der beteiligten Altersgruppen nicht vergleichbar waren, wurde kein Preis ausgelobt, dafür erhielten aber alle Schülerinnen und Schüler eine Urkunde und einige Erinnerungsstücke an die direkt beteiligten ROBEX-Partner AWI, DLR, Marum und Airbus.